THAM KHẢO MỘT SỐ BỘ PHẬN CẤU TẠO CỦA 1 NGÔI NHÀ?
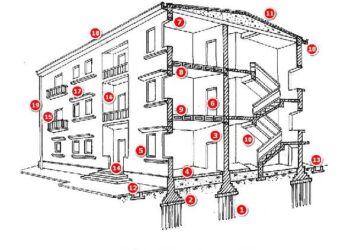
Các bộ phận cấu tạo nhà ở liên kết với nhau chặt chẽ. Mỗi cái có nhiệm vụ, vai trò ...

Các bộ phận cấu tạo nhà ở liên kết với nhau chặt chẽ. Mỗi cái có nhiệm vụ, vai trò ...
Gợi ý cách tính giá thiết kế thi công theo m2 giúp gia chủ nắm bắt được chi phí trong ...

Masteri Centre Point quận 9 "Khu căn hộ compound cao cấp bậc nhất trung tâm đại đô thị " vị ...

Công ty Cổ phần Bất Động Sản Newhomes tự hào là đơn vị cung cấp dịch vụ về Bất động sản ...

Được thành lập vào đầu năm 2016, Tập đoàn Sunshine Group với nền tảng là một hệ thống công ty thành viên ...
Tập đoàn Danh Khôi được biết đến là một trong những đơn vị phân phối bất động sản hàng đầu tại ...

Khu căn hộ hạng sang Lumiere Boulevard là dự án Bất động sản thứ 4 của Tập đoàn Masterise ( ...

Gamuda Land được thành lập vào năm 1995 là công ty phát triển bất động sản của Gamuda Berhad, một tập đoàn hàng đầu ...

Cha đẻ của Vingroup được thành lập trong thời kỳ khủng hoảng kinh tế tài chỉnh nổ ra trên toàn thế giới ...

Masterise Group tiền thân chính là Công Ty Thảo Điền Investment, công ty chính thức chuyển thành Tập đoàn Masteris Group ngày 28/11/2019